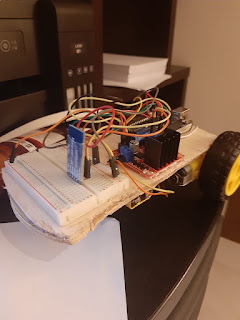
En esta clase hicimos la conexión del otro motor al puente H, pero esta vez vamos a controlar la velocidad de los motores por medio del arduino Tambien aprendimos lo que es el termino PWM es unos valores que se manda de 0 a 255 al arduino Ejemplo de como iría conectado Puente H arduino IN1-------------2 IN2-------------3 IN3-------------4 IN4-------------5 ENA-----------6 ENB----------11 El codigo que hicimos para controlar la velocidad de los motores es: int in1=2; int in2=3; int in3=4; int in4=4; int ena=6; int enb=11; void setup() { pinMode(in1,OUTPUT); pinMode(in2,OUTPUT); pinMode(in3,OUTPUT); pinMode(in4,OUTPUT); pinMode(ena,OUTPUT); pinMode(enb,OUTPUT); } void loop() { //adelante digitalWrite(in1,HIGH); digitalWrite(in2,LOW); analogWrite(ena,255);//velocidad maxima digitalWrite(in3,HIGH); digitalWrite(in4,LOW) analogWrite(enb,120);//velocidad mas baja }